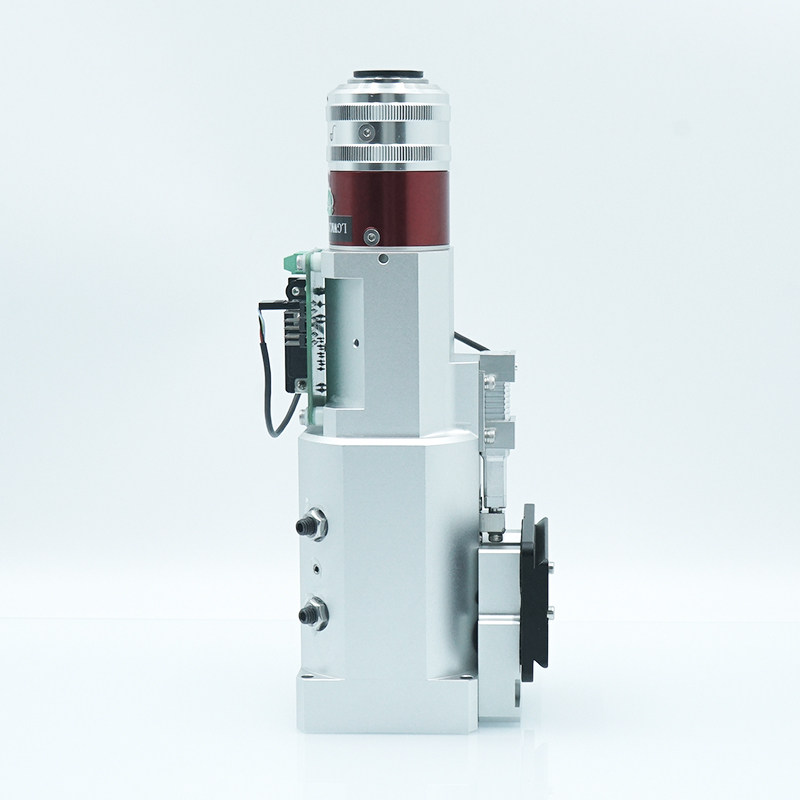
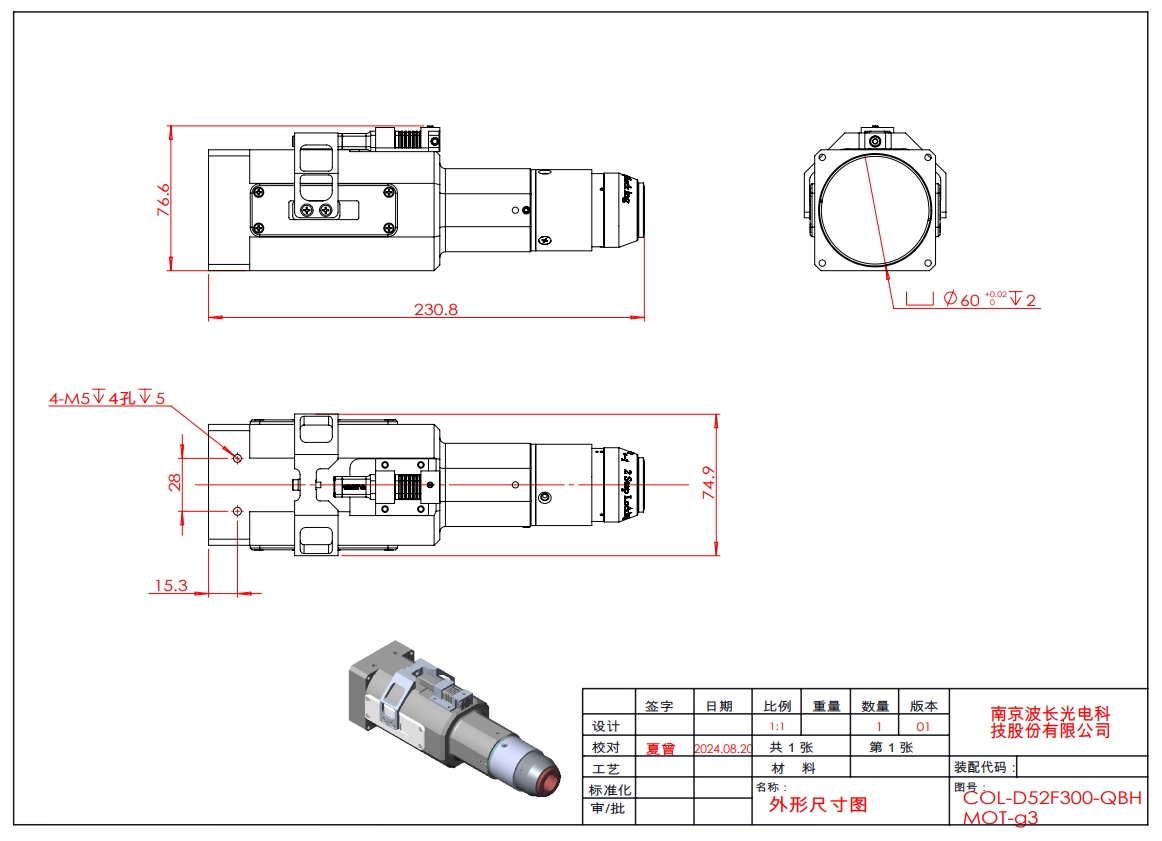
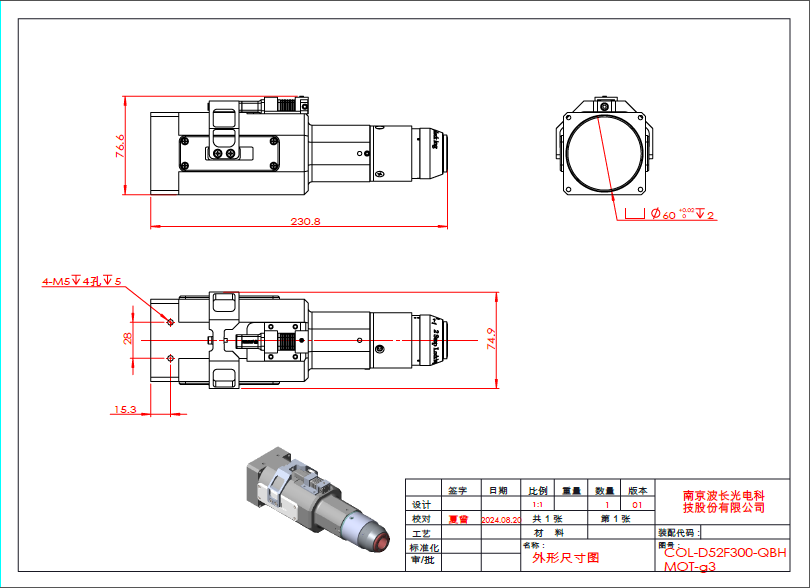
Bộ chỉnh tiêu cự điện tử có động cơ COL-D52F300-QBH-MOT






Bộ chỉnh tiêu cự điện tử có động cơ COL-D52F300-QBH-MOT
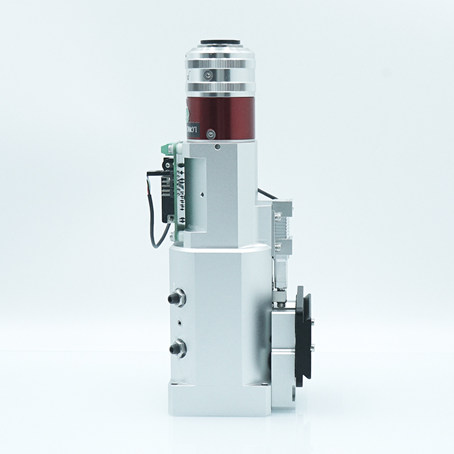
Bộ chuẩn trực điện tử có động cơ
Nguyên lý hoạt động của bộ chuẩn trực laser là hội tụ một chùm tia sáng phân kỳ thông qua một hoặc một nhóm thấu kính có tiêu cự dương, sao cho chùm tia song song với trục quang học. Ví dụ, nếu chùm tia phát ra từ đầu của laser sợi quang nhỏ và phân kỳ ở vài độ, bộ chuẩn trực có thể chuẩn trực chùm tia thành một chùm tia có đường kính lớn hơn nhưng góc phân kỳ rất nhỏ.





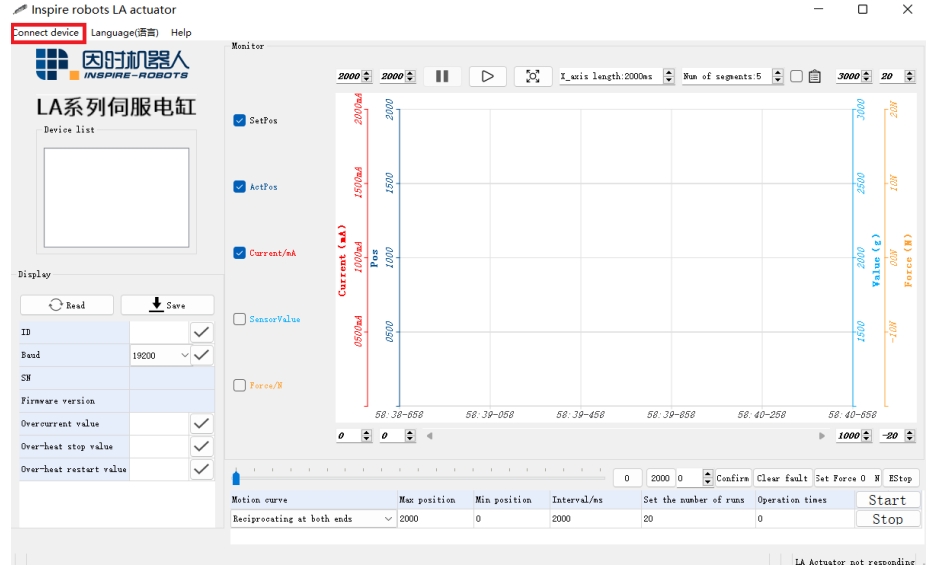
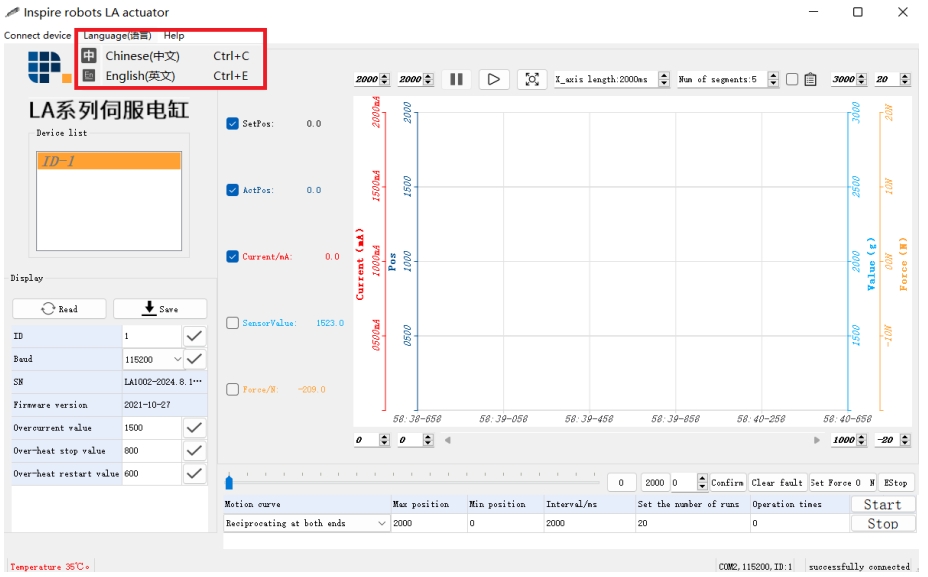
Hướng dẫn vận hành phần mềm động cơ D52-F300
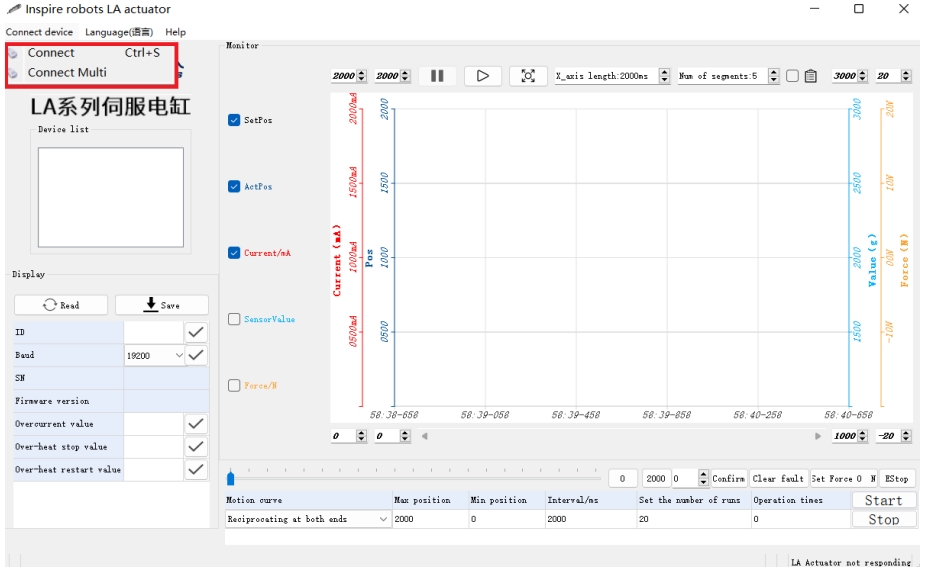
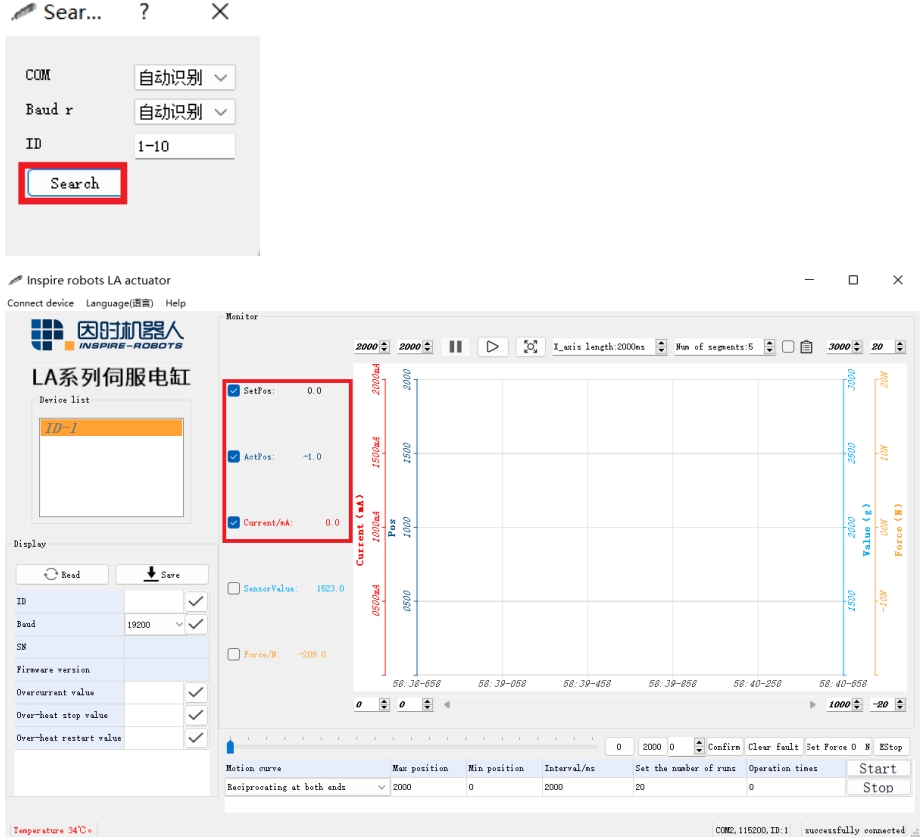
1. Thiết bị được kết nối:
Menu 'Tìm kiếm thiết bị' -> chọn cổng nối tiếp, tốc độ Baud, phạm vi ID hoặc chế độ tự động mặc định -> nhấp vào tìm kiếm. Sau khi tìm thấy bộ truyền động thành công, dữ liệu sẽ được cập nhật trong cửa sổ đồ thị dữ liệu và thanh trạng thái ở cuối cửa sổ chính.
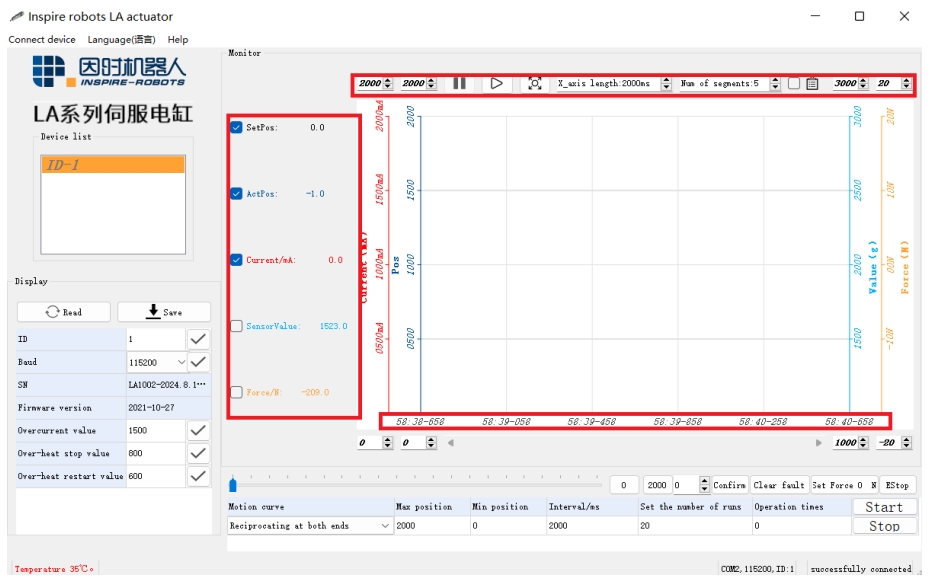
2. Giám sát thông tin trạng thái:
Sau khi kết nối bộ truyền động, biểu đồ dữ liệu sẽ hiển thị thông tin trạng thái thời gian thực như vị trí, dòng điện và giá trị chấp nhận (hệ thống LAF, LASF) của bộ truyền động. Thanh trạng thái phía dưới sẽ hiển thị thông tin như nhiệt độ bộ truyền động, lỗi và trạng thái kết nối.
Hiển thị số liệu bằng số của 5 dữ liệu hàng đầu trên biểu đồ và hộp kiểm để chọn hiển thị đường cong;
Phía trên đồ thị có bốn nút dùng để tạm dừng, tiếp tục, xóa và khôi phục phạm vi hiển thị của các đường cong thời gian thực; Kéo: Nhấn và giữ nút chuột phải để kéo đường cong trên đồ thị;
Thu phóng: Nhấn và giữ nút chuột trái để chọn một vùng nhất định để phóng to hiển thị trên biểu đồ; Nhấp vào nút 'Khôi phục phạm vi trục tọa độ', và phạm vi hiển thị sẽ trở lại bình thường;
Cài đặt phạm vi trục dữ liệu: Phạm vi dữ liệu của mỗi trục dữ liệu có thể được thiết lập thông qua các hộp văn bản phía trên và phía dưới trục dữ liệu;
Kéo trục thời gian: Khi đường cong dữ liệu tạm dừng, bạn có thể kéo thanh trượt bên dưới dòng thời gian để kéo dòng thời gian;
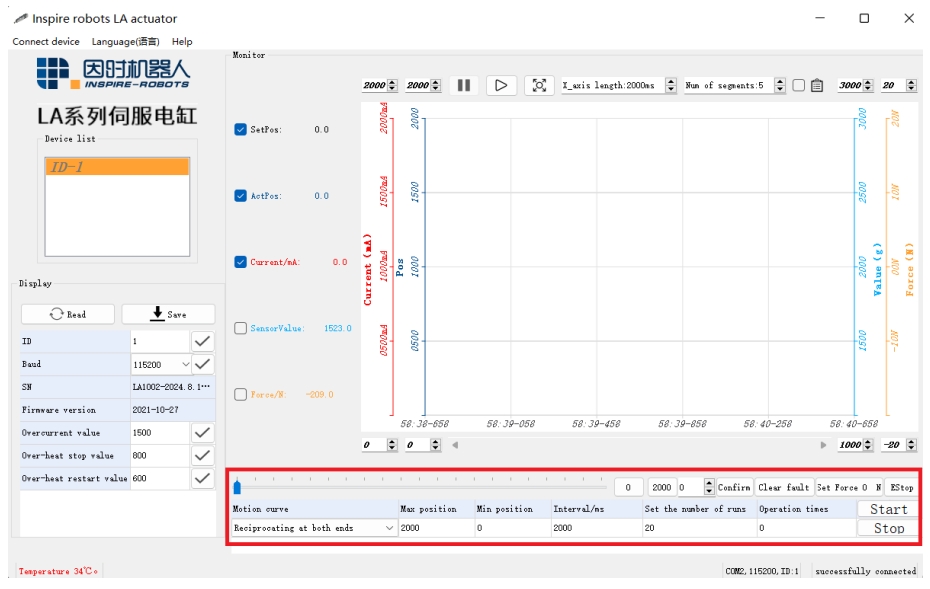
3. Điều khiển chuyển động:
3.1 Kéo thanh trượt hoặc đặt hộp văn bản bên phải thanh trượt có thể điều khiển vị trí của cần đẩy dẫn động.
3.2 Bảng bên dưới thanh trượt vị trí có thể được sử dụng để thiết lập chuyển động tịnh tiến tuần hoàn của bộ truyền động.
3.2.1 Sau khi chọn dạng chuyển động tịnh tiến và thiết lập các thông số tương ứng, kiểu truyền động sẽ thực hiện chuyển động tịnh tiến với tốc độ nhanh nhất.
3.2.2 Sau khi chọn dạng sóng tam giác hoặc sóng sin và thiết lập các thông số tương ứng, kiểu điều khiển sẽ hoạt động theo dạng sóng đã thiết lập.
3.3 Hai nút ở phía bên phải của thanh trượt vị trí có thể gửi lệnh xóa lỗi và lệnh dừng khẩn cấp đến bộ truyền động.
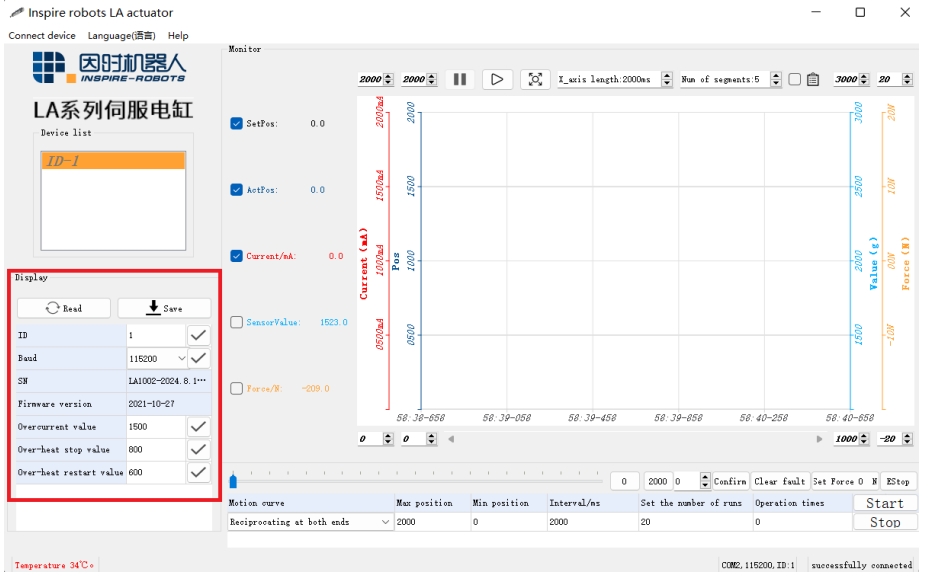
4. Cài đặt thông số
4.1 Sau khi nhấp vào 'Đọc thông số', phần mềm sẽ hiển thị các thông số bên trong của ổ đĩa trong một bảng.
4.2 Mã định danh bộ truyền động, phạm vi 1-254.
4.2 Tốc độ Baud của cổng nối tiếp, có hiệu lực sau khi được lưu.
4.3 Giá trị bảo vệ quá dòng, với phạm vi 300-500mA.
4.4 Giá trị bảo vệ quá nhiệt, nằm trong khoảng từ 200 đến 800.
4.5 Giá trị khởi động hồi nhiệt, nằm trong khoảng từ 200 đến 600, cần lưu ý rằng giá trị bảo vệ quá nhiệt phải cao hơn giá trị khởi động hồi nhiệt 50, nếu không các thông số sẽ không hợp lệ.
4.6 Mọi thay đổi tham số cần được lưu lại; nếu không, thao tác sẽ thất bại sau khi tắt nguồn và khởi động lại ở phía bên kia.
5. Chuyển đổi giữa tiếng Trung và tiếng Anh
Menu “Ngôn ngữ” -> Chọn “Tiếng Trung” hoặc “Tiếng Anh”.
Bộ chuẩn trực điện tử này có thể chuẩn trực tia laser sợi quang và hoạt động hiệu quả ở khoảng cách xa; dạng cầm tay, thuận tiện cho việc sử dụng ngoài trời; đầu điện tử độ chính xác cao, nhanh chóng nhắm vào mục tiêu. Đồng thời, bộ chuẩn trực này chủ yếu được sử dụng để loại bỏ vật cản và phù hợp với công suất laser không vượt quá 2000W và giá trị NA của laser không vượt quá 0,065. Dải bước sóng laser khoảng 1064nm.
Bộ chuẩn trực điện tử có động cơ
Bộ chuẩn trực điện tử này có thể chuẩn trực tia laser sợi quang và hoạt động hiệu quả ở khoảng cách xa; dạng cầm tay, thuận tiện cho việc sử dụng ngoài trời; đầu điện tử độ chính xác cao, nhanh chóng nhắm mục tiêu. Đồng thời,Bộ chuẩn trực này chủ yếu được sử dụng để loại bỏ vật cản và phù hợp với công suất laser không vượt quá 2000W và giá trị NA của laser không vượt quá 0,065. Dải bước sóng laser khoảng 1064nm.




DANH MỤC SẢN PHẨM
Wavelength đã tập trung vào việc cung cấp các sản phẩm quang học có độ chính xác cao trong suốt 20 năm qua.
